|
|
|
|
| Ur tidskriften Livsmedelsteknik, nr 3,1996 sid 31-33 | |||
| Kan modern medicinsk kirurgi visa | |||
| vägen för styckningsbranschen? | |||
| IT-branschen utvecklas mycket snabbt. Virtual Reality (VR) används nu i praktiskt tagit alla former av FoU. Fjärrstyrd hjärnkirurgi är tack vare VR inte långt borta. Köttforskningsinstitutet (Kl) har genomfört det första forskningsprojektet i världen för att stycka kött helautomatiskt med VR-teknik som bas. | |||
| Steen Herlevsen | |||
| Produktionsingenjör, Köttforskningsinstitutet | |||
| Arbetet med att stycka slaktkroppar är ett tufft jobb som
utförs i högt tempo i en kall miljö. Det handlar om hantverk och om teknik som det tar
flera år att lära sig. Arbetet är tungt och består av relativt korta arbetscyklar.
Samma muskelgrupper belastas ständigt. Tyvärr håller kroppen inte för denna
belastning. Många styckare blir förtidspensionerade eller tvingas byta yrke. Över 90
procent av all arbetssjukdom inom branschen är belastningsskador Det finns därför all
anledning att utveckla metoder som underlättar arbetet. Många FoU projekt inom automatisk styckning har genomforts i Nya Zeeland, Australien, England, Danmark och speciellt i Frankrike där flera hundra miljoner kr har investerats. I Nya Zeeland används ofta mekaniska sensorer. AMARC i England har satsat mycket på "force feed back"-sensorer. I Frankrike har man länge arbetat med "learn by error"-teknik vid programmering av skärningsrobot. I Danmark pågår ständigt forskning och försök med olika sensortyper. Även danskarna föredrar ofta mekaniska sensorer. Köttforskningsinstitutet är först med att simulera skärnings- och sensorteknik i VR-miljö. Principen för Virtual Reality Istället för att bygga verkliga fysiska prototyper byggs prototyper upp i en tredimensionell värld. Konstruktören ritar upp sin prototyp i s k trådmodeller som bekläds med ytor som motsvarar materialvalet. Ytornas hårdhet och andra parametrar definieras. Ska en robot användas byggs den upp på liknande sätt. Samma gäller visionsystem, sensorer verktyg etc. När den visuella prototypen år konstruerad börjar programmeringen. Robotens styrsystem integreras liksom visionsystemet, sensorsignaler och separata program för verktygsstyrning till en fungerade enhet. Konstruktören upptäcker mycket snart svårigheterna och kan ändra på systemet. När allt fungerar kan kritiska problem testas i verkligheten. Nya bilar tas fram med VR-teknik på åtta månader, mot flera år förr i tiden. Alla moderna produktutvecklare använder tekniken för framtagning av nya produkter, t ex meteorologer, biologer, fysiker, kemister och läkare. |
|
|||
| Medicinsk hjärnkirurgi |
| Tyska och amerikanska forskare har tagit fram grafiska 3D-modeller på hela människokroppen. Även hjärnan har modellerats upp in i minsta detalj. På grund av den biologiska variationen måste alla hjärnans beståndsdelar modelleras med ett mycket finmaskigt trådnät, så att även förstoringar upp till 200 gånger bibehåller extrem hög upplösning i bilden. |
| Vid operation är det tänkt att en s k CAT-scanner placeras runt patientens huvud. CAT-scanneren scannrar hjärnan i skikt och skickar signalerna till den grafiska modellen som visar hjärnans inre i realtid och - tack vare grafiken - i extremt hög upplösning. |
| Operationen föregås av en noggrann förundersökning av
patienten med VR-teknik, röntgenbilder och en konferens med deltagande av olika
specialister. Ingreppet planeras och vägen in till tumören fastläggs på basis av det
aktuella fallet, tidigare erfarenheter etc. När ingreppet genomförs och patienten har
bedövats, borras ett litet hål i skallbenet och instrumentet fixeras framför
borrhålet. Kirurgen sitter i en behaglig stol och har en VR-skärm på huvudet. Hennes
eller hans visuella syn styrs med ena handen och instrumentet med den andra. Alla
deltagare i operationen kan följa ingreppet på en skärm i operations rummet. Den
opererande kirurgen kan styra instrumentet med hjälp av förstoringstekniken. Kirurgen
kan så att säga gå runt om tumören och studera den och även se instrumentets avstånd
till vitala organ. Det är viktigt att poängtera att det beskrivna förfarandet ännu inte har genomförts i verkligheten, men installationen finns på flera tyska och amerikanska kliniker där den används för träning och utbildning. Urbening av kotlettrad Styckning av kött är naturligtvis en långt mera "grovkornig" hantering än medicinsk kirurgi, men där finns likheter. Den biologiska variationen är en. Det finns inte två djur som är exakt likadana. Hanteringsprecisionen är däremot mycket mindre kritisk. Vid styckningsteknik kan man använda grövre - och mycket billigare - bildanalyssystem. I det projekt som är genomfört började vi med att utföra en exakt modell av kotlettbenet. En kotlettrad renskrapades och avsyrades, bokstavligt talat. Därefter avbildades benet grafiskt. Se bild 1. Forskningsinsatsen i det aktuella projektet har utförts av ett team under ledning av Norbert Lay, Fraunhofer Institutet IPA i Stuttgart som är ett av Europas ledande forskningsinstitut vad avser produktionsutveckling. Forskningen finansierades av Arbetslivsfonden och Scan HB i Kristianstad. |
 |
Styckningschefen Kenneth Persson och
ett 15-tal personer; arbetsledare, styckare, skyddstekniker, sjukgymnaster m fl inom Scan
HB, deltog aktivt i projektarbetet. Tekniken ska utvecklas med hänsyn till den biologiska
variationen sa att tekniken kan överföras på andra köttdetaljer och djurslag i
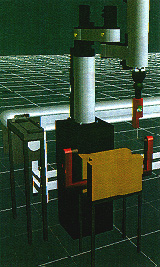
framtiden. Virtuell prototyp Prototypen byggdes upp i VR, se bild 2. Samtliga visionsystem, 2D och 3D, färg och gråskala som finns på marknaden inkl röntgen testades. Det bästa visade sig vara 2D gråskalevision. Olika automatiska skärverktyg testades; elektriska, pneumatiska och hydrauliska. De sistnämnda var bäst. Hydraulkniven skär genom köttet utan att det rör på sig, vilket är en stor fördel. Roboten har ingen egen kraft varför kraften till kniven måste tillföras utifrån. Olika typer av sensorer testades och f n tror vi mest på någon form av mottryckssensor (force feed-back sensors). |
|
| Bild 2. Gripanordning |
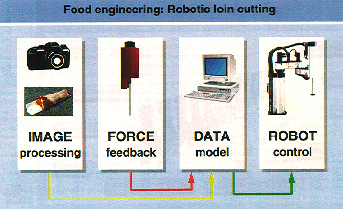
| Styrning av robot och kniv En vattentålig robot har valts ut. Robotens rörelser fastläggs på standardmodellen och anpassas till den biologiska variationen. Från visionssystemet modelleras den aktuella kotlettraden upp och roboten förses med de önskade skärvägarna. All information från visionsystemet och från sensorerna går in i styrsystemet, som med hjälp av s k Fuzzy Logic Control fattar beslut om robotens fortsatt skärväg, se bild 3. |
| Kniven är upphängd i en knivhållare som kan finjustera
knivens exakta placering och lutning. Knivhållaren är försedd med egna rörelser och
sensorsystem, så att den mycket snabbt kan justeras och undvika frontalkollisioner med
benet. Robotens styrsystem kan inte justeras tillräckligt snabbt för att undvika
kollisioner. Som övergripande styrsystem finns ett s k adaptivt neuralt nätverk. Knivhållaren förprogrammeras (i VR-miljö) med ett antal problemlösningsaktiviteter som är olika längs skärvägen. Räcker inte detta till, kommer roboten att stoppa och operatören måste visa systemet hur problemet ska lösas. Operatörens ingrepp lagras i minnet och adderas till systemets databas för problemlösning så att liknande problem löses automatiskt i framtiden ("learn by error".) |
 |
Fysisk prototyp nästa Som framgår av ovanstående ligger svårigheterna först och främst kring knivhållarens styrning och utveckling av tillförlitlig sensor teknik. Genom praktiska försök, som ska genomföras under de närmaste månaderna, ska testas vilka sensor er som är mest tillförlitliga och snabba nog för att styra kniven. När detta är löst, har en stor del av den ekonomiska risken for att genomföra en fysisk prototyp röjts ur vägen och möjligheterna för ytterligare investeringar underlättats. |
| Bild 3. Med hjälp av s k Fuzzy Logic Control fattas beslut om robotens fortsatta skärväg |
|
|
|